GPS 기술 개요
 invalid-file
invalid-file1. GPS 시스템
GPS는 미국방성에서 개발한 위성을 이용한 범 세계적인 무선 항법시스템으로 GPS위성의 위치 및 속도를 제공함으로서, 사용자가 위치, 속도 및 시간을 정확하게 계산할 수 있도록 하여 준다. GPS는 '93년도에 초도 운용을 시작하여, '95년도부터 정식 운용이 시작되었으며 아래와 같은 특성을 갖는다.
- 3차원위치, 고도 및 시간의 정확한 측정
- 전세계적으로 24시간 연속적인 서비스 제공
- 기상조건, 간섭 및 방해에 강함
- 수동적이며 무제한 사용 가능
- 전세계적인 공통 좌표계 사용: WGS-84(World Geodetic System of 1984)
GPS는 표준측위 서비스(SPS: Standard Positioning System)와 정밀측위 서비스(PPS: Precise Positioning System)로 나누어 지는데 SPS는 주로 민간부문의 서비스 용이며, PPS는 주로 군사부문의 용도에 사용된다.
가. GPS 시스템의 구성
GPS는 위성을 이용한 위치, 속도 및 시간 측정 서비스를 제공하는 시스템으로서 3개의 부문, 즉, 위성부문, 지상관제 부문, 사용자 부문으로 구성되어 있다.
1) 위성 부문
위성부문은 24개의 GPS 위성으로 구성되어 있으며, 각각의 GPS위성에는 세슘 원자시계와 루비듐 시계가 각각 2개씩 장착되어 정밀한 시간을 유지하고 있고, 각 위성마다 PRN (Pseudo Random Noise) 코드라 불리우는 고유 코드를 발생하고 있어 이 코드에 의해 위성들을 구분할 수 있다. 총 24개의 위성들이 있으며 21개의 동작위성과 예비위성 3 개가 현재 12시간의 공전 주기로 지구를 돌고 있다.
위성의 안테나는 헤릭스 어레이(Herix Array)로서 가장 큰 게인은 15dB이며 우측으로 원형편광 되어 있다. GPS 위성은 지상고도 약 20,183Km에서 궤도 이심율이 0.03도 보다 작은 원에 가까운 타원궤도를 돌고 있으며 궤도 경사각은 55도이다. 그리고 적도면에 등간격으로 분포된 6개의 궤도면에 각각 4개씩 할당되어 총 24개로 구성된다. GPS위성이 지구를 한바퀴 도는 공전 주기는 항성시로 정확하게 11시간 58분으로 하루에 두 번씩 지구를 공전한다.
GPS 위성은 사용자가 최소한 5개의 위성으로부터 신호를 수신할 수 있도록 배치 되었다. 각각의 위성은 2개의 L밴드 주파수, 즉 L1(1,575.42 MHz) 및 L2(1,227.6MHz)를 송신하며, L1은 P코드(Precise Code) 및 C/A 코드(Coarse/Acquisition)를 반송하며, L2는 P코드를 반송한다. 이들 코드에 항법데이터가 중첩되며, L1, L2에 의해서 반송된다.
2) 지상관제 부문
지상관제 부문은 전세계에 위치하고 있는 추적 관제국 및 송신국의 시스템으로 구성되어 있다. 지상관제 부문은 크게 3가지로 구성되어 있는데, 여기에는 주 관제국(MCS: Master Control Station)과 무인으로 운영되는 부 관제국(MS: Monitoring Station)및 지상 송신국(GA: Up-link Ground Antenna)이 있다. 주 관제국은 GPS의 전체 시스템을 관리하고 통제하는 중심이며, 미국의 Colorado Springs에 있는 펠콘공군기지에 위치해 있다. 주 관제국은 부 관제국으로 부터 자료를 받아 위성이 제 궤도를 유지하는데 필요한 모든 처리와 계산을 수행하며 각 위성의 궤도를 포함한 항법 메시지를 만들어 낸다. 주 관제국과 부 관제국, 지상 송신국 사이의 통신은 GPS가 아닌 다른 위성을 이용하여 이루어 진다. 부 관제국은 세계적으로 고루 분포된 5개의 GPS감시소로 구성되어있으며, 상공을 지나는 모든 GPS위성을 추적하여 위성까지의 거리와 거리변화율을 동시에 측정하는 것이다. 3개의 지상 송신국의 임무는 위성과 S-band(up-link 1783.74MHz, down-link 2227.5MHz)로 통신하여 위성의 작동 상태에 관한 자료를 수신하고, 위성을 제어하는 신호와 주 관제국으로부터 받은 새로운 내용의 항법 메시지를 위성으로 보내는 일이다.
3) 사용자 부문
사용자 부문은 GPS 수신기와 안테나 그리고 자료처리 소프트웨어로 구성되어 있으며, GPS 위성으로부터 신호를 수신하여 안테나의 위치와 속도 및 시각을 알 수 있다. 2개 이상의 수신기로 동시에 관측할 경우에는 두 안테나 사이의 상대거리와 기선의 방위각 및 고도각은 물론 거리차이의 3차원 성분까지도 정밀하게 측정할 수 있다. 수신기의 위치와 속도, 시각을 계산하려면 4개 이상의 위성을 동시에 관측하여야 하는데, 이것은 3차원 좌표와 시간을 합쳐 4개의 미지수를 결정해야 하기 때문이다.
나. 위치측정 원리
GPS는 삼각측량의 원리를 사용하고 있는데, 전형적인 삼각측량에서는 알려지지 않은 지점의 위치가 그 점을 제외한 두 각의 크기와 그 사이 변의 길이를 측정함으로 결정되는데 반해 GPS에서는 알고싶은 점을 사이에 두고 있는 두변의 길이를 측정함으로 미지의 점의 위치를 결정한다는 것이 고전적인 삼각측량과의 차이점이라 할 수 있다. 인공위성으로부터 수신기까지의 거리는 각 위성에서 발생시키는 부호신호의 발생시점과 수신 시점의 시간 차이를 측정한 다음 여기에 빛의 속도를 곱하여 계산한다(거리=빛의 속도×경과시간). 실제로 위성의 위치를 기준으로 수신기의 위치를 결정하기 위해서는 이 거리 자료 이외에도 위성의 정확한 위치를 알아야 하는데 이 위성의 위치를 계산하는 데는 GPS 위성으로부터 전송되는 궤도력을 사용한다.
다. 측위오차
GPS 측위오차는 다음 3가지로 대별되는데, 구조적 요인에 의한 거리오차, 위성의 배치 상황에 따른 기하학적인 오차, 그리고 미국방성이 실시하는 선택적 이용성(SA)에 의한 오차가 있다. 이러한 GPS의 의사거리 측정에 영향을 주는 주요 오차 인자에 대하여 살펴 보면 다음의 <표 1>과 같다.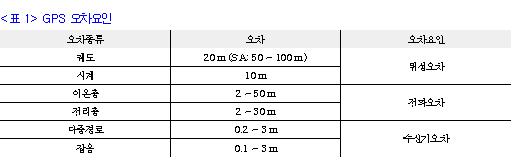
1) 구조적인 요인에 의한 거리오차(Range Error)
거리오차는 의성과 수신기간의 측정된 거리의 오차를 의미하는데 다음과 같은 요인에 의하여 발생하며, 약 5~10m정도이다.
① 위성시계의 오차
② 위성궤도의 오차
③ 대기권의 전파지연
④ 수신기에서 발생하는 오차
이와 같은 거리오차는 위성의 배치상황에 따른 기하학적인 요인과 어울려, 최종적으로 위치의 오차로 나타나게 된다.
2) 위성의 배치상황에 따른 기하학적 오차의 증가
측위시 이용되는 위성들의 배치상황에 따라 오차가 증가하게 되는데, 오차 삼각형을 줄일 수 있도록 적당히 배치되어 있는 경우에 위치의 오차가 작아진다.
GPS수신기는 관측된 데이터를 이용하여 PDOP(Position Dilution of Precision)를 계산하고, 이를 거리오차에 곱하면 측위 오차가 된다. 즉, 거리오차(Range Error)×PDOP = 측위오차가 된다. 따라서 대부분의 수신기는 PDOP가 작 은 위성의 조합을 선택하여 측위계산을 하고 이를 표시하도록 설계되어 있다. 최근 수신기의 성능이 좋아서 PDOP가 3인 경우 위치오차는 대략 15m CEP(Circular Error Probability), 즉, 50% 오차확율의 범위에서 평면으로 약15m정도이다.
3) 선택적 이용성에 의한 오차
미국방성의 정책적 판단에 의하여 오차를 일부러 증가시킨 것으로, 미국방성이 이를 인위적으로 늘리고 있는데, 이것이 선택적 이용성에 의한 오차이다. 즉, 미국방성이 인가한 사용자만이 선택적으로 사용할 수 있다는 의미로 선택적 이용성(Selective Availability)인 것이다.
2. GPS 서비스
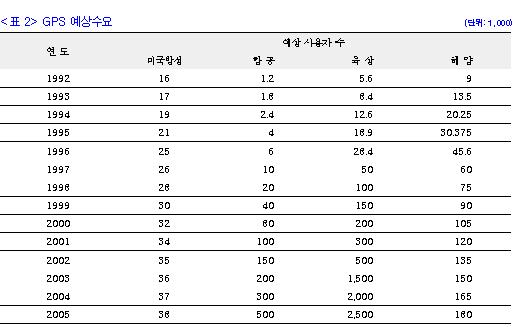
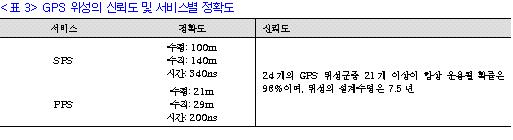
GPS는 표준측위서비스(SPS: Standard Positioning System)와 정밀측위서비스(PPS: Precise Positioning System)으로 나뉘어 지는 데 SPS는 주로 민간 부문의 서비스 용이며, PPS는 주로 군사부문의 용도에 사용된다. <표 2>는 GPS 예상수요를 나타내고 <표 3>은 위성신뢰도 및 서비스별 정확도를 나타낸다.
GPS/PPS는 주로 군용 무선항법의 필요성에 의하여 개발되었으나, 미국 및 외국의 민간부문에서의 사용은 선별적으로 허용될 예정이며, 아래와 같은 사항이 고려되어 사안별로 결정된다.
- 미국의 국익에 부합
- 민간부문 사용자가 GPS/PPS 이외에 다른 대안이 없는 경우
- 안보상 요구조건의 충족
가. 표준 측위서비스(SPS)
SPS는 전세계적으로 연속적인 표준의 측위 및 시간 측정 서비스를 자격요건에 제한 없이 제공한다. SPS는 단일 주파수(L1)를 이용하며, 낮은 비율은 PRN 문자열을 사용하고 이는 1.023Mbps의C/A코드를 사용한다. 또한 정확도는 미국의 안보를 고려하여 미국방성에 의하여 설정되었으며, 수평측위 정확도가 100m 이다. SPS의 경우 고의적으로 위치정확도를 떨어뜨리기 위한 SA(Selective Availability)기능을 이용하여 정확도를 떨어뜨린다.

나. 정밀 측위 서비스(PPS)
PPS는 위치, 속도 및 시간 정보를 가장 정확하게 전세계적으로 연속적으로 제공하는 서비스이다. 이 서비스는 공인된 미정부기관, 군사용도 및 자격요건을 갖춘 민간사용자에게만 제한 적으로 제공된다. 비공인된 사용자는 PPS에 접근할 수 없도록 P코드(Precise Pseudorandom Tracking Code)라 불리우는 암호를 사용한다. P 코드 해독이 가능한 군용수신기는 22m의 수평측위 정확도를 갖는다.
3. GPS 위치측정 기법
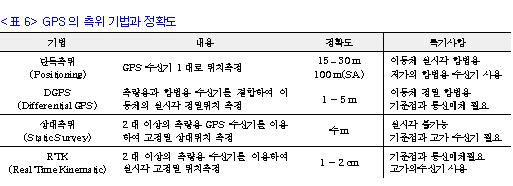
GPS를 이용한 위치측정 기법은 크게 <표 6>과 같이 구분되며 용도 및 정확도에 따라 다르게 적용된다. 단독측위 기법은 1대의 저가 수신기를 가지고 4대 이상의 GPS 위성으로부터 코드신호를 수신하면 수신기내에서 자신의 위치를 실시간으로 계산한다. 이 기법의 위치결정 정밀도는 15~30m 로서 여러가지 기법들 중에서 가장 낮다. 그러나 미국에서 의도적으로 정밀도 저하조치(SA)를 취할 경우 정밀도는 100m로 떨어진다.
가. DGPS
DGPS(Differential GPS) 기법은 단독측위 기법의 정밀도를 향상시키기 위해 개발된 것으로 2대 이상의 수신기와 통신매체가 필요하다. 기준점에 설치된 1대의 수신기에서는 이미 알고 있는 기준점의 위치 정보를 이용하여 관측된 각 위성에 포함된 오차량을 계산할 수 있다. 이것을 위성마다의 거리오차 보정치(Range Correction)로 환산하여 국제 표준 형식인 RTCM SC-104 자료 형태로 전환한 후, 통신매체를 통해 이동체에 탑재된 수신기에 전달하면 이동체에서는 저가의 항법용 수신기를 가지고도 차량 등의 이동체에 대해서는 수 m , 정지한 대상에 대해서는 1미터 이내의 실시간 위치 측정이 가능하다. 이 기법은 주로 ITS와 GIS 분야에 활용되고 있다. DGPS용 통신매체로는 FM 부가방송 서비스나 비콘 통신망, 이동통신 혹은 위성 통신망 등이 사용될 수 있다. 현재 후처리 DGPS 서비스 차원에서 인터텟을 이용한 보정값 전송 방법에 대한 연구도 활발히 진행되고 있다.
나. 후처리 상대측위 기법(Post Processing Static Survey)
측지 및 측량, 지각변동의 감시등과 같이 수 cm이하의 고정밀 위치 결정이 요구되는 분야에서는 후처리 상대측위 기법을 사용한다. 기준점과 측정지점에서 동시에 수신한 L1/L2 반송파 자료를 상대측위 결정능력을 갖는 프로그램에 의해 계산하여 정밀도를 현격히 증가시키는 방법이다. 일반적으로 상용화된 고정밀 GPS 자료처리 프로그램은 측정 거리에 대하여 백만분의 일 또는 천만분의 일 정도의 정밀도를 가지며, 스위스 베른 대학의 천문연구소에서 개발한 Bernese GPS S/W와 같은 연구용 프로그램의 경우, 두 수신기간의 측정거리에 대해 1억분의 2(20 ppb: part per billion)의 정밀도로 위치를 측정할 수 있는 능력을 갖고 있다.
다. RTK(Real Time Kinematic)
광범위한 관측점의 좌표들을 1~2cm의 정밀도로 빠른 시간내에 획득하기 위해 개발된 것이 실시각 이동측량 기법인 RTK(Real Time Kinematic)이다. RTK의 기본 개념은 오차 보정을 위해 전송하는 데이터가 거리오차 보정치가 아닌 기준국에서 수신한 반송파 자료라는 것을 제외하고는 DGPS의 개념과 거의 유사하다. 다만, RTK에서는 기준점에서 수신한 각 위성의 반송파 자료를 지속적으로 제공하여야 하고, 정보의 전송장애로 발생할 수 있는 오차의 한계가 DGPS보다 상대적으로 크기 때문에 보다 안정적이고도 신속한 통신매체가 요구된다. 또한 측정지점의 수신기가 RTK 자료처리 기능을 가진 고가의 장비라는 점이 DGPS와 다르다. 현재 GPS를 응용하는 여러분야에서 DGPS와 RTK가 주로 사용되고 있으며, GIS나 측량, 항법 등 모든 응용분야가 RTK 기법의 사용에 초점을 맞추어 실용화되고 있다.
4. GPS 대체위성 시스템 개발
가. 무선항법시스템의 발전 동향
최근들어 LORAN-C, OMEGA, VOR/DME, TACAN 등 기존의 지상베이스 항법시스템이 점차 퇴조하고, 육상, 해상 및 항공 통합형의 항법시스템인 위성항법시스템이 그 기능을 대체하고 있는 실정이다. 이러한, 위성항법시스템으로는 미국의 GPS 및 러시아의 GLONASS가 구축되어 군사 및 민간 분야에서 이용되고 있다. 민간용 GPS로 사용되는 SPS 자체만으로는 정확도 및 신뢰성, 가용도에 한계가 있기 때문에 이를 개선하기 위한 방법으로 DGPS 등의 보정시스템, 다른 위성을 추가로 연계하여 지상 또는 위성에서 확장/보정하는 확장항법시스템에 대한 개발이 진행되고 있고, GLONASS를 이용하는 항법시스템이 개발되고 있으며, 최근에는 GPS/ GLONASS 겸용 수신기가 개발되어 출시되고 있다. 유럽과 일본에서는 미국의 GPS 독점운용과 GLONASS의 향후 가용성 불안에 대한 대책으로, 민간운용을 기본으로 하고, 궁극적으로는 GPS에 대한 의존도를 경감시키기 위한 차원에서 대체 위성항법시스템에 대한 연구가 폭 넓게 진행되고 있다. 이 계획에는 GNSS(Global Navigation Satellite System) 1, 2 계획이 포함되어 있다.
GNSS-1 은 GPS 및 GLONASS를 기본으로 하고 여기에 정지궤도(GEO) 위성을 연계한 확장 위성항법시스템으로서, 유럽에는 EGNOS(European Geostationary Navigation Overlay Service)라고도 하며, 2000년까지 초기 운용능력을 갖추고, 2003∼4년까지 전체 시스템의 구축을 완료할 예정이다. GEO 위성의 대상으로는 항법전용위성인 INMARSAT-3이나 일본의 MSAT이 활용될 수 있는데, 이들 위성은 GPS/GLONASS 서비스를 개선하기 위해 항법신호를 중계할 수 있는 중계기가 탑재되어 있다.
GNSS-2는 유럽이 GNSS-1을 대체할 목적으로 연구하고 있는 차세대 국제 민간 위성 항법시스템. 정지궤도위성과 경사궤도 위성을 기본으로 하는 것이 특징이며, 유럽지역만을 커버하는 ENSS(European Navigation Satellite System), 유럽과 남미지역을 커버하는 ESANSS (Europe and South-America Navigation Satellite System) 등 많은 안이 검토되고 있다. 범세계적 협력차원에서보다는 GPS에 대응하여 유럽지역의 이해를 우선하여 계획되고 있는 위성항법시스템이다.
나. 대체위성 시스템의 발전 동향
1) 유럽
미국방부에 의한 GPS의 독점 운용 및 이에 따른 유료화 가능성에 대비하고 정확도와 신뢰도, 가용도를 향상시킨 차세대 범세계 민간 위성항법시스템(GNSS: Global Navigation Satellite System)에 대한 연구개발을 ESA(European Space Agency)를 중심으로 진행하여 왔다.
GNSS는 기술적으로는 기존 GPS의 정확도인 100m를 5-10m까지 향상시키며, 무결성 감시 기능을 강화하여 신뢰도를 향상시키고, 가용도를 향상시키기 위하여 확장시스템을 이용하며, 통신기능 등에 부가서비스를 추가하는 것이다. 이를 위하여 기존의 지상제어 의존도 감소, 위성에서의 자동 궤도 결정 및 위치계산의 정확도 향상, 위성체내의 시계 정확도 향상, 지상으로의 전파환경 보상, 수신기에서의 전파수신 오차제거 등의 기술개발을 필요로 한다. 현재 검토 중인 시스템 구조는 경사궤도 및 정지궤도 위성을 이용하는 구조와 다수의 저궤도 위성 및 소수의 정지궤도 위성을 이용하는 구조가 있다.
2) 러시아
러시아는 적절한 장비를 장착한 사용자들이 정확한 위치, 속도 및 시간을 결정할 수 있는 우주로부터 나온 신호를 제공하기 위한 GLONASS를 개발 및 구현하고 있다. GLONASS는 높은 정확성과 가용성을 제공할 것이며 항법 커버리지는 연속적이고 전세계적이며 모든 기상에서 가능하다. 3차원 위치 결정은 GLONASS 위성에 의해 송신된 통과시간 측정과 RF 신호의 도플러 효과에 기초를 두고 있다.
3) 일본
일본은 우주개발사업단(NASDA:National Space Development Agency of Japan)이 2002년부터 새로운 독자 지역권 위성항법 시스템을 구축하기위해 700억 엔의 예산으로 한 개의 정지위성과 3개의 경사 저궤도 위성을 사용하여 중국, 인도네시아, 일본, 괌을 포함하는 지역에 10m의 정확도를 제공할 계획을 추진하고있다. 또한, 현재의 GPS를 확장하는 지역시스템 구축 방법을 추진하고 동시에 유럽과 공동으로 GNSS시스템을 개발하는 방안을 추진중이다.
일본은 GNSS-1프로그램 개념으로 민간항공운행을 위하여 정지궤도 위성인 MTSAT (Multi-functional Transport Satellite)위성을 이용하는 위성확장시스템(MSAS: MTSAT Satellite-based Augmentation System)을 개발하고 있다.
♣ (기술정보센터, 주간기술동향 통권 901호,